【前回大会との違いは】
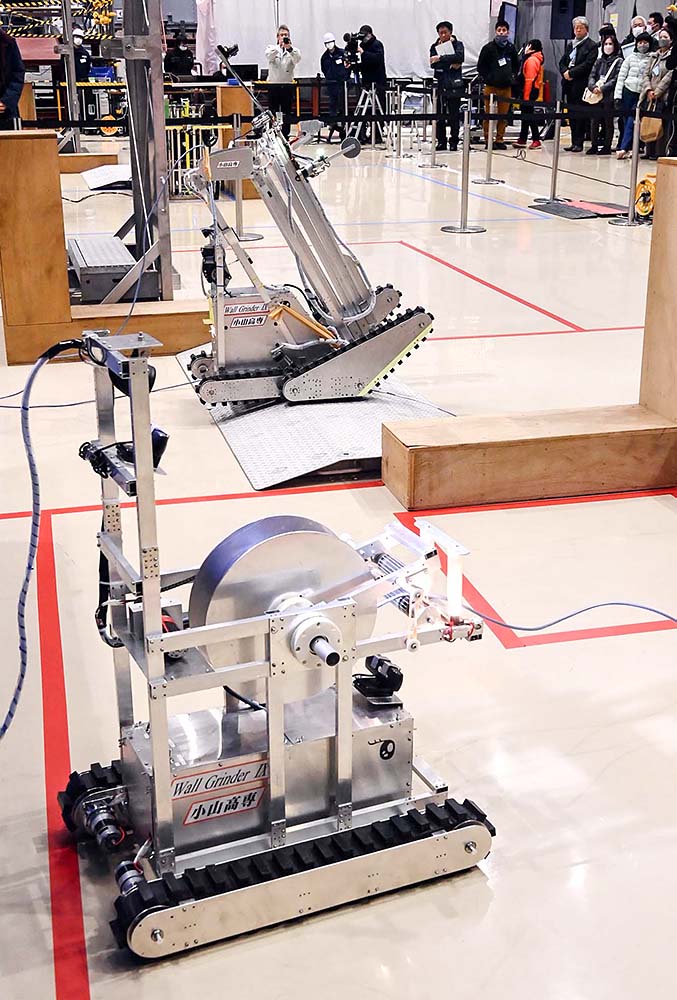
今大会では帰還することも課題となり、ケーブルマネジメントの難易度が上がったといえるだろう。小山高専は親機(奥)に加えケーブルの巻き取り機構を持つ子機(手前)も作成。今回ルールのため、子機は停止していたが移動することも可能。実際の現場を想像すると、その利点は大きいだろう。
【課題の主テーマは】
競技の主題となる除染作業(模造紙の塗りつぶし)をする熊本高専のロボット。写真のように往復させる方法や、回転で塗りつぶす方法など、各チーム工夫を凝らす。熊本高専は課題を完遂し最優秀賞に次ぐ優秀賞の福島県知事賞を獲得した。上位チームの評価は極めて拮抗していたという。
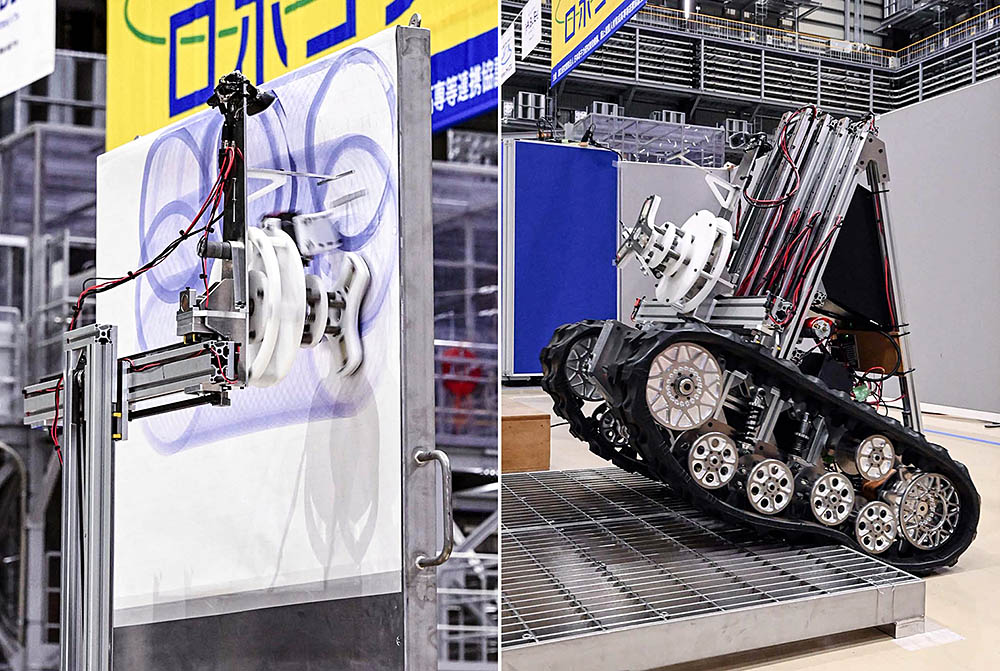
【走行ルートにも難所が】
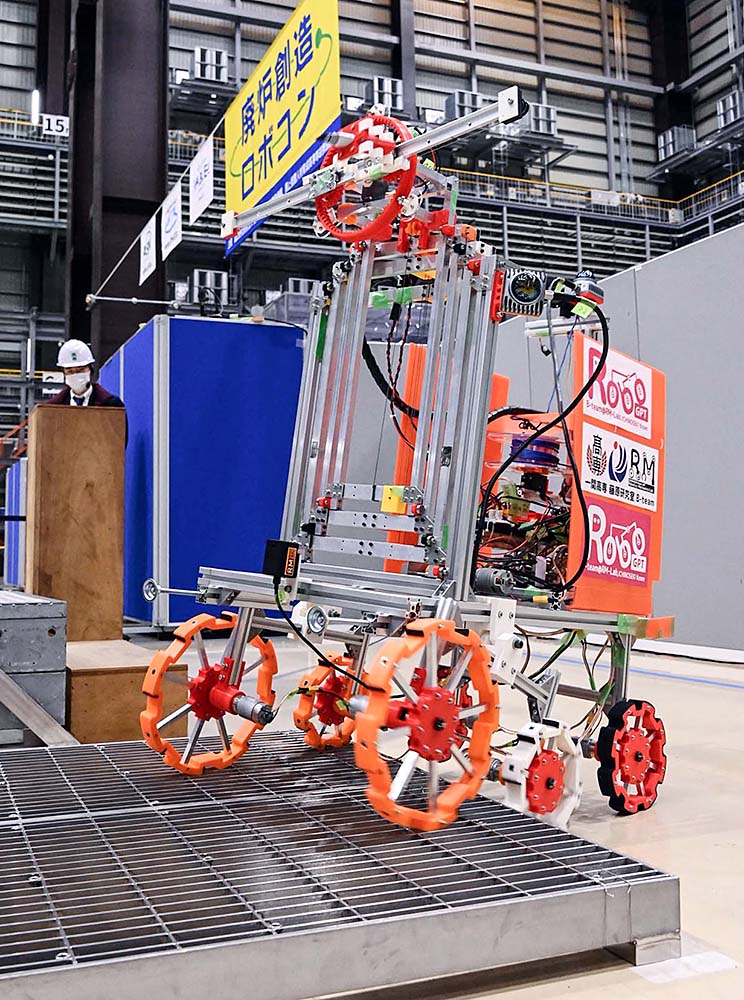
走行ルートに設けられた難所の一つが、高さ95ミリメートルのグレーチング。グレーチングはプラントや工事現場などで広く使われている金属製の足場で、原子力発電所内にも多く使われている。写真の一関高専のロボットは大きな車輪と、惑星探査車などで採用されるサスペンションのロッカーボギー機構でクリア。帰還までこなし、技術賞(原子力機構理事長賞)を受賞した。
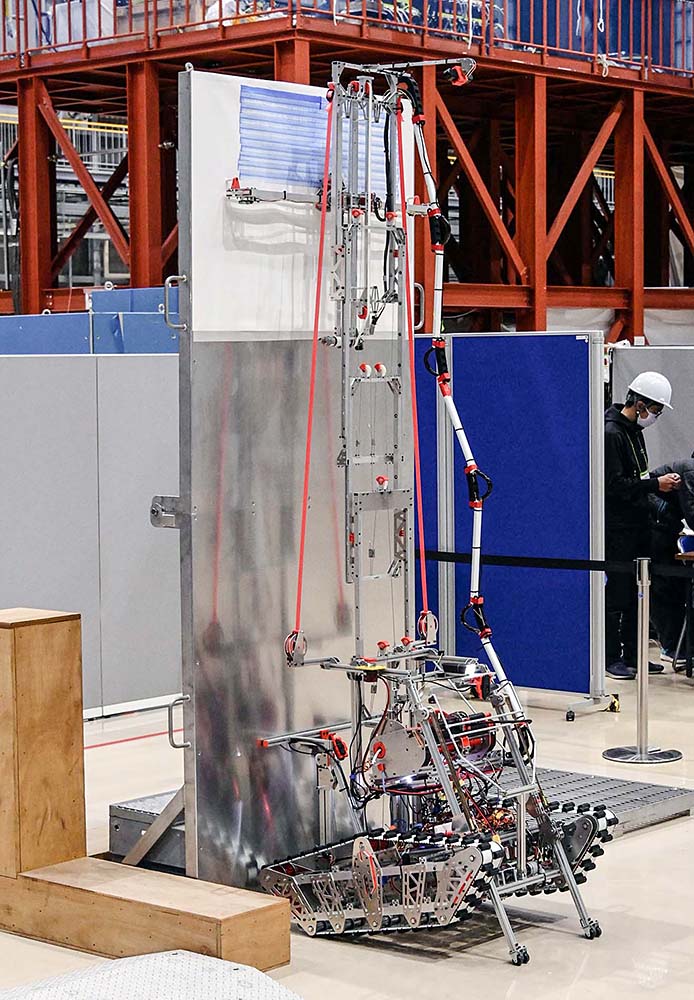
【最速タイムを記録】
「歴代最強の足回りを実装し、最大の除染面積と最速タイムを出した」と評価された舞鶴高専の舞鶴高専廃炉研究会Bチームのロボット。「実際に使うことを考えると、これくらい頑丈なものを創らないといけない」と考えたそうで、競技後にはロボットの上に乗って見せてくれた。除染は回転する方法を採用=写真左。スピーディーに均一な円を描き、塗りつぶした。
【操作は遠隔で】

出発の瞬間を待つ大阪公立大高専チーム。この後、扉が閉められ、選手からはロボットが見えない状態となり、遠隔操作で競技を行う。右の操縦者は選手宣誓も行った西山黎音さん。競技一番手の緊張と寒さで手が震えてしまったそうだ。前日のテスト走行では完走したものの、本番では惜しくも帰路のグレーチングでつまずいた。バランスの良い機能が評価されイノベーション賞(イノベ機構理事長賞)を受賞した。