【「X-1ペネ」アクセスで最高位は】

「X―1ペネ」からのアクセスで最高位となったのは旭川高専チーム。優秀賞の福島県知事賞を受賞した。「課題はかなり難しい(パイプや急な階段など)求められることが多い」と競技前に語っていたが、完成度の高いロボットで、速やかに回収対象物にアプローチ。今回の課題で最難関と思われる急な階段もクリアしたが、最後の「X-1ペネ」通過に手間取り、時間切れとなった。近く卒業する2人が2年生の後輩を加えての挑戦だった。競技後には「彼が引き継いで、これより素晴らしいロボットが来年できると思う」とエールを送る。
【急な階段をどう克服?】
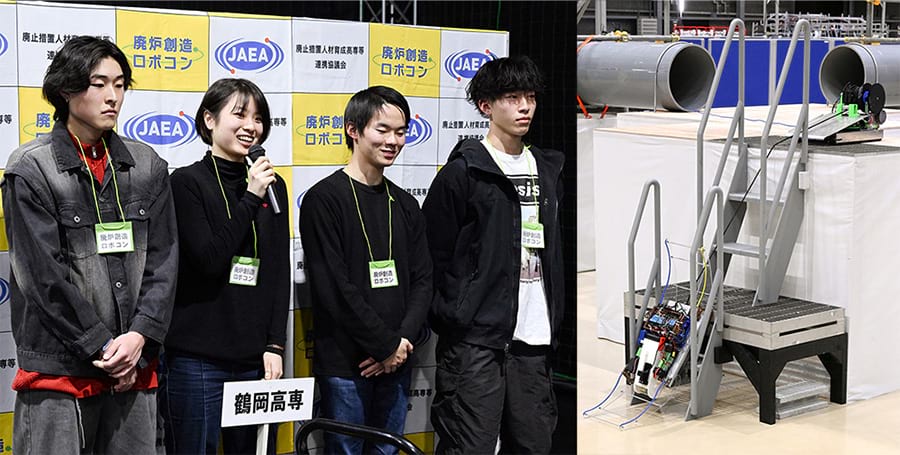
実際の格納容器内を想定した傾斜約65度の急な階段は、各チームを苦しめた。写真のアイディア賞となった鶴岡高専チームは、上階に残したロボットが、階下で対象物を回収するロボットを引き上げる仕組みとした。階段を滑り上がれるよう「そり機構」を取り入れた。そりの設計には腐心し「これが10台目ぐらいで、学校の階段で練習して、一番適したものを採用した」という。また前回から2回目の参加で、ロボット制御を担当する選手は「去年は緊張して正常な判断ができなかった。今年は制御を2人で行い、声を掛け合いながら冷静な判断ができた」と、仲間の力を結実させ成果を見せた。
【対象物を回収するには】
対象物の回収でも、各チーム特色を見せる。茨城高専チームは粘着性のシートに対象物を着け、ロボット上部の格納スペースに、器用にしまい込んだ。帰路の階段もスムーズに上っていたが、惜しくも時間切れとなった。本番では重圧のかかるトップバターを務めたが、着実なロボット運用は観客をうならせ、「見せたい性能を発揮できて満足している」と話した。審査でも、信頼性の高いロボットを仕上げたと評価され技術賞に選ばれた。
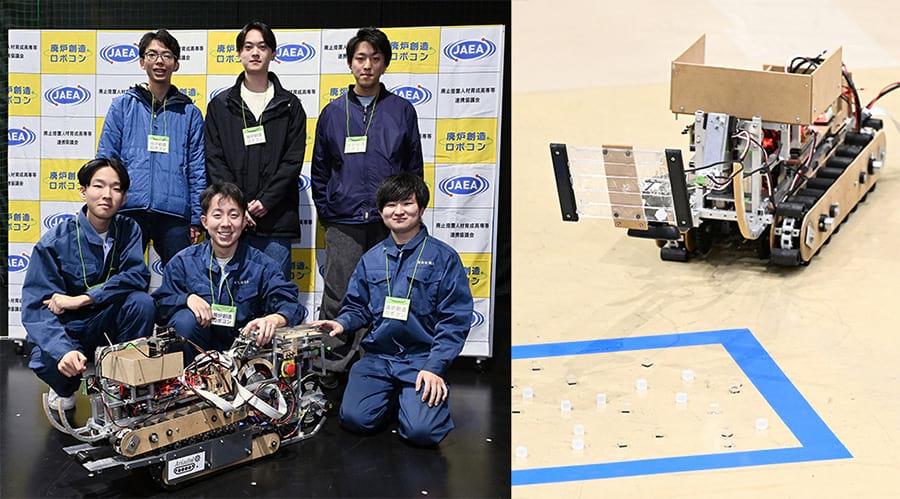
【特色を出し合って】

熊本高専からは2チームが出場。それぞれの特色を出し、いずれも特別賞を獲得した。写真左のAチームは薄いプラスチック板で花のような形の回収機構が独特だ。プラスチックの花弁が閉じる事によって対象物を包み込み回収する。写真右のBチームのロボットは、倒れても自分の力で起き上がる様子を見せてくれた。複雑な格納容器内の調査に向け、ロボットの対応力を示した。