【未経験でもひるまずに】
駆動機構にクローラーを用いるチームが多い中、スピードや安定性を求めてホイール方式を採用した小山高専チーム。ロボット製作が初めてだったそうだが、テストランでLANケーブルが切れるトラブルにも対応し、善戦する姿を見せてくれた。本番ではケーブルを親機が踏んで子機の動きを制限してしまい、時間が削られたのが悔しいところだ。競技後には、高放射線下で影響を受けやすい半導体部品を親機では少なくし、子機を回収できる確率を上げるといった競技では見えにくい工夫も披露してくれた。
【多彩なアプローチで】

柔軟な「ラテラルシンキング」で挑み、特別賞・三菱重工業賞を受賞したのは大阪公立大学高専のチーム。スロープを設けて最難関の階段に挑んだ。現実の廃炉作業でも、スロープなどでロボットが行き来しやすい環境を設けられれば、繰り返しの作業が容易になりそうだ。とはいえ遠隔操作で長尺のスロープを設けることも難易度の高い取り組み。本番では子機を下ろすところまでいかなかった。親機子機それぞれに360度カメラを付け、映像をVRゴーグルで見られるようにするなどの工夫も取り入れていた。
【発想と挑戦】

発想と挑戦という観点から特異なロボット見せてくれたのが、一関高専の藤原研究室Cチーム(写真は競技中にデモンストレーションを行い説明するようす)。階段で有効ではないかと考え、駆動部にアルキメディアン・スクリューを取り入れた。学校の階段ではうまくいったそうだが、本番の急な階段では苦戦した。この推進方式は実際、雪上や泥などの上を走行する車両に用いられているそうで、廃炉作業の中でも有効なシーンがあるかもしれない。「福島第一の廃炉作業ではこうした新たな技術へのチャレンジが非常に重要」だと評価され特別賞・日立GEベルノバニュークリアエナジー賞を受賞した。
【どうするのだろう?】
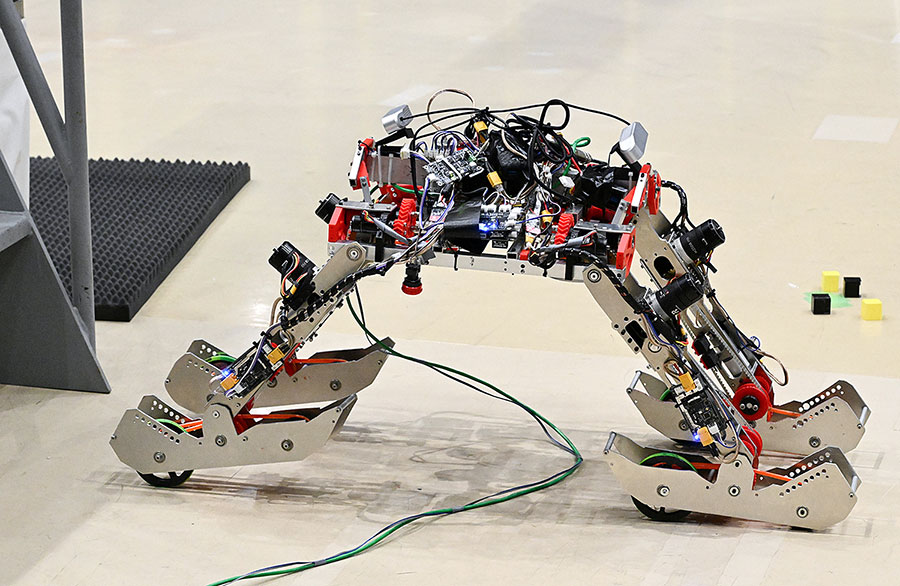
一関高専からは3チームが出場したが、それぞれに特色のあるロボットが示された。機械技術部チームは先端に車輪のついた4脚状のロボット。一見、どんな動きをもくろんでいるかわからないが、脚を階段に引っかけて上り下りすることを目指したのだという。非常に難易度の高そうな機構だが特に「ロボットの重量と動力のトルク(力)のバランスをどうするか最も悩んだ」という。思いを形にするために試行錯誤することはどんなに貴重な経験だったろう。
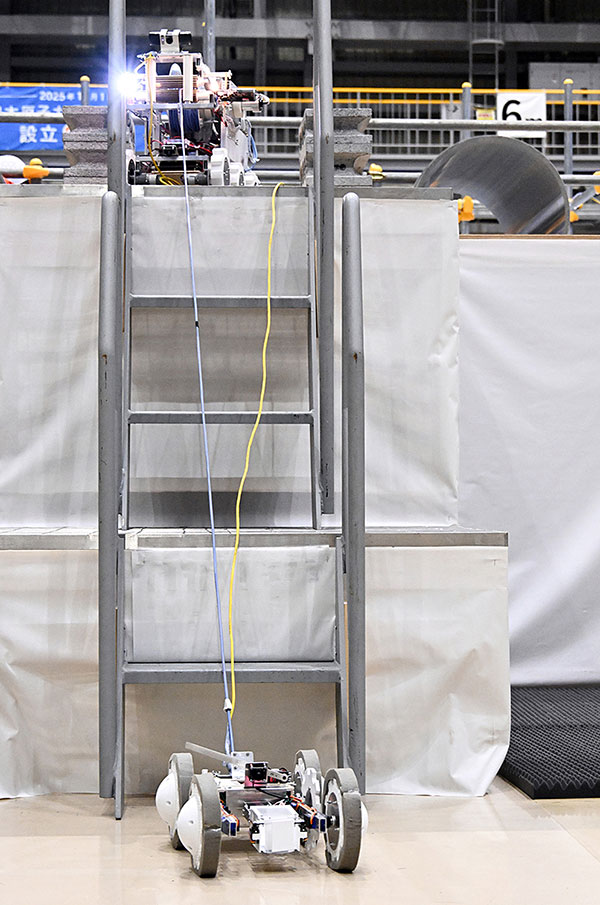
【いざ競技開始】

同じく一関高専から出場した藤原研究室Bチーム。今回の参加はナイジェリアからの留学生アウェ・アヨデジ・ラッキーさんの卒業研究の一環でもあったそうだ。同チームのロボットは今大会でも再軽量級。蛇型で車輪や関節につけるモーターの数が多いのが大変だったそうだ。写真はテストランで所定の位置にロボットを据えたようすだ。学校などでは、本番の環境を再現するのは難しく、テストランは貴重な機会。ロボットに注がれるまなざしは自ずと鋭くなる。