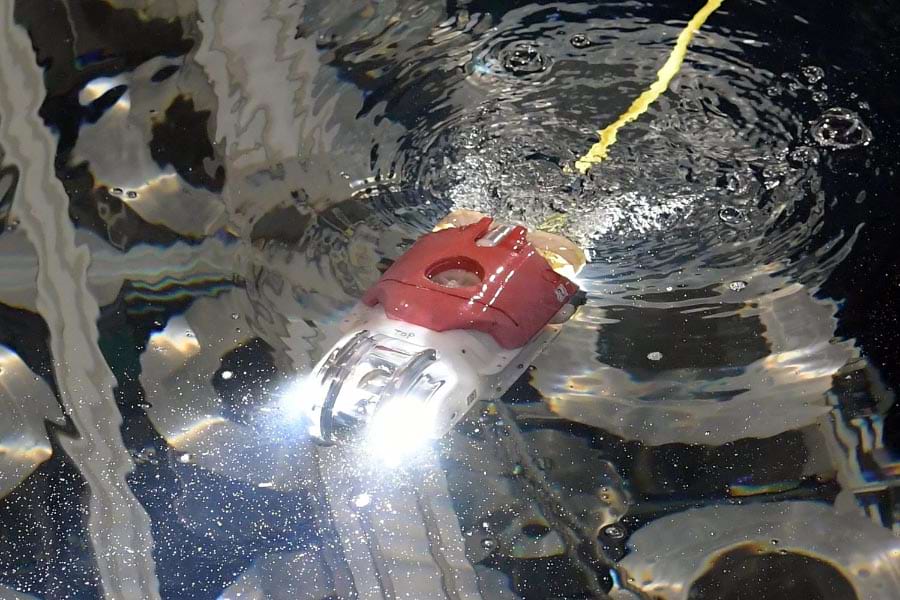
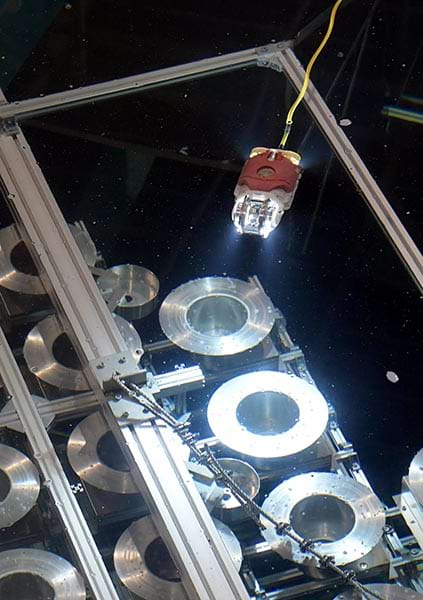
国際廃炉研究開発機構(IRID)と東芝は6月15日、東京電力福島第一原子力発電所3号機の原子炉格納容器内部の調査のために開発した水中遊泳ロボットを報道陣に公開した。圧力容器から燃料が溶け落ち、燃料デブリとなって格納容器の底にたまっているとみられる3号機。格納容器内部には床面から約6メートルの高さまで水がたまっていることが確認されている。廃炉工程を定めた「中長期ロードマップ」では2017年夏に1~3号機の燃料デブリ取り出し方針を決めるとしている。今回公開されたロボットによる内部調査は7月に行われる予定で、燃料デブリ取り出し方針の決定に必要な情報を収集することを目指す。