◆IRIDと東芝、水中ロボットを小型化◆
◇東京電力福島第一原子力3号機内部調査に投入◇
国際廃炉研究開発機構(IRID)と東芝は6月15日、東京電力福島第一原子力発電所3号機の原子炉格納容器内部の調査のために開発した水中遊泳ロボットを報道陣に公開した。圧力容器から燃料が溶け落ち、燃料デブリとなって格納容器の底にたまっているとみられる3号機。格納容器内部には床面から約6メートルの高さまで水がたまっていることが確認されている。廃炉工程を定めた「中長期ロードマップ」では2017年夏に1~3号機の燃料デブリ取り出し方針を決めるとしている。今回公開されたロボットによる内部調査は7月に行われる予定で、燃料デブリ取り出し方針の決定に必要な情報を収集することを目指す。
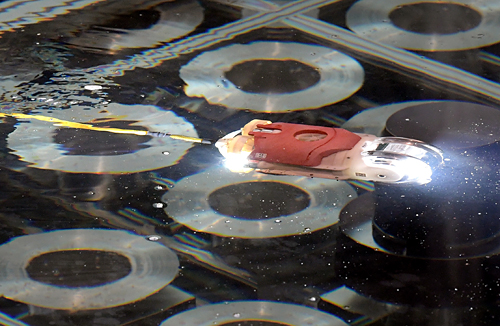
今回開発されたのは直径約13センチメートル、長さ約30センチメートルの小型水中遊泳ロボット。有線ケーブルで電源供給や通信を行い、遠隔で操作する。後方4つ、上方1つのスクリューで推進する。報道公開は海上・港湾・航空技術研究所の港湾空港技術研究所(神奈川県横須賀市)で行われた。
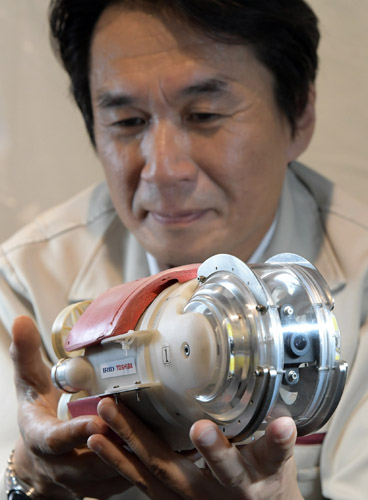
ロボットは直径約13センチメートル、長さ約30センチメートル、重さ約2キロで愛称は「ミニマンボウ」。東芝では、これまでも水中を泳ぐロボットを用いて原子炉内部の点検を実施していたが、3号機では格納容器内部にアクセスするための貫通部分が直径約14センチメートルと小さいため、従来型のロボットを小型化するとともに、耐放射線性を高めた。
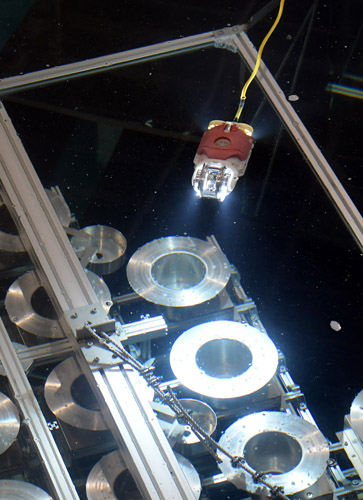
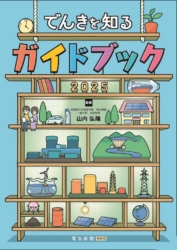
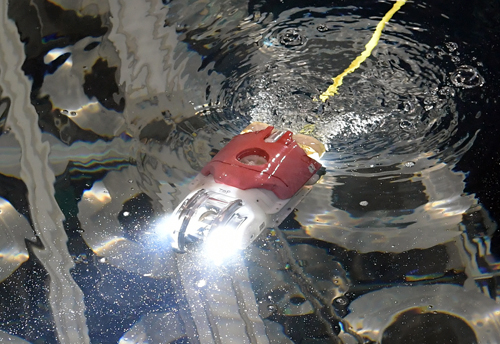
原子炉圧力容器を支える土台「ペデスタル」の開口部から内側に入り、前方と後方に一つずつ搭載したカメラとLEDライトで、暗闇の圧力容器底部を調査する。報道公開ではペデスタル内の構造物を模擬した水槽でデモが行われた。

ロボットから送信される映像を見ながら操作する職員。圧力容器底部の構造物の損傷状況を確認し、さらに下へと潜水できるルートがあればペデスタル底部の状況も調べる。